6-осевой манипулятор IRB 6400 в сочетании с контроллером S4 обеспечивают короткое и точное время цикла, быструю перенастройку и стабильно высокую точность процессов.
Усовершенствованные возможности связи контроллера S4C: CAN-bus, Interbus- Sslave, удаленные входы/выходы AllenBradley, Ethernet...
Язык программирования RAPID демонстрирует расширенные программные возможности.
Адаптируемость
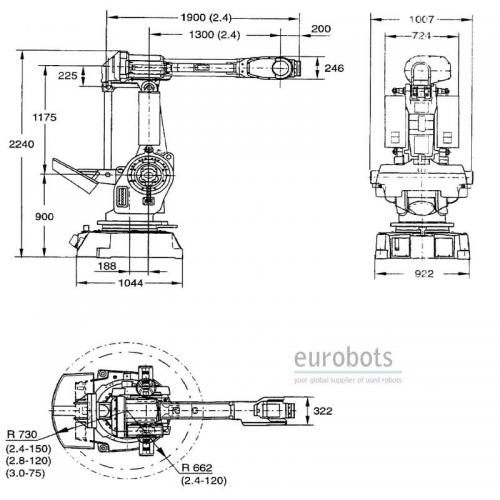
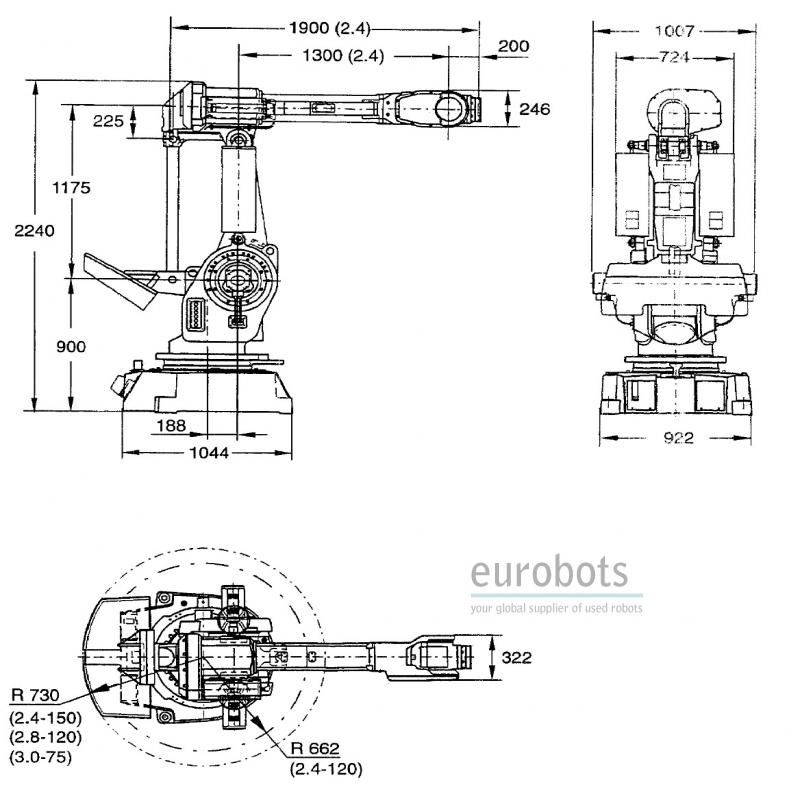
Компактный дизайн IRB 6400 с небольшой зоной взаимных помех обеспечивают возможность его инсталляции в цехах с высокой плотностью производственного оборудования. Система связи, интегрированная в основание робота, - легкозаменяемая, а увеличение выноса руки с 2.5 до 3 м занимает менее 30 минут.
Оси робота калибруются поочередно, что обеспечивает быстрое возобновление процесса производства.
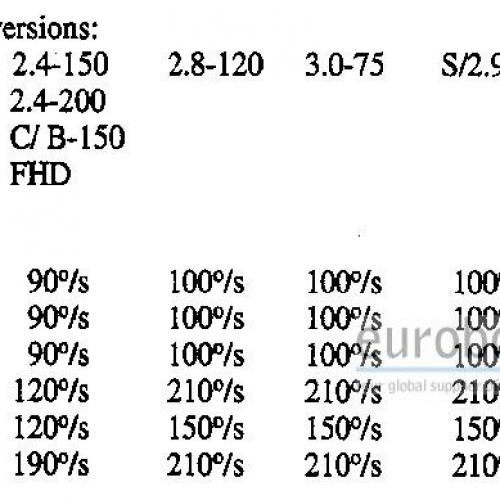
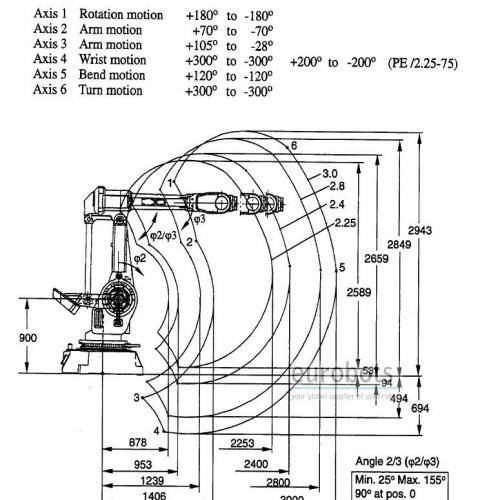
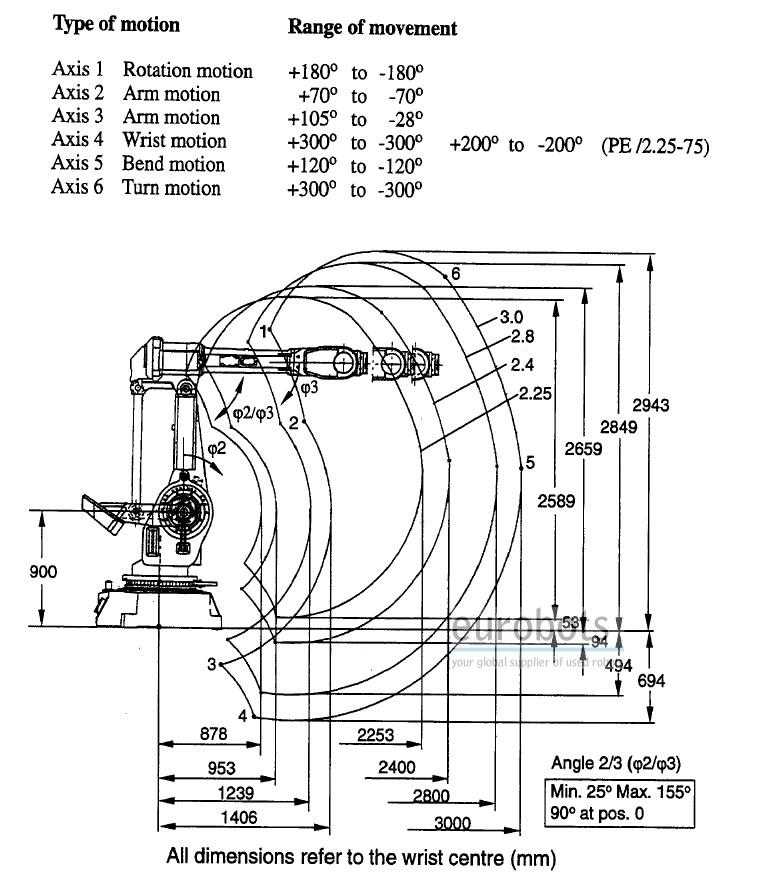
Характеристики робота:
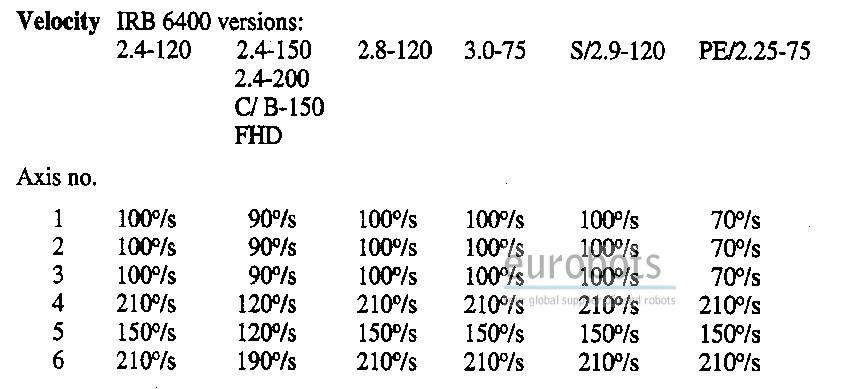
Скорость движения:
Области применения:









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}