



{kind=link}
{kind=link}
{kind=link}
Applicazioni
Il DOBOT Nova2 è un braccio robotico versatile e compatto progettato per soddisfare scopi commerciali e di vendita al dettaglio.
Il Nova2 presenta una capacità di carico utile di 2 kg, che gli consente di gestire con precisione vari compiti. Che si tratti di assemblaggio, prelievo e posizionamento, test o altre operazioni complesse, Nova2 fornisce la forza e la destrezza necessarie.
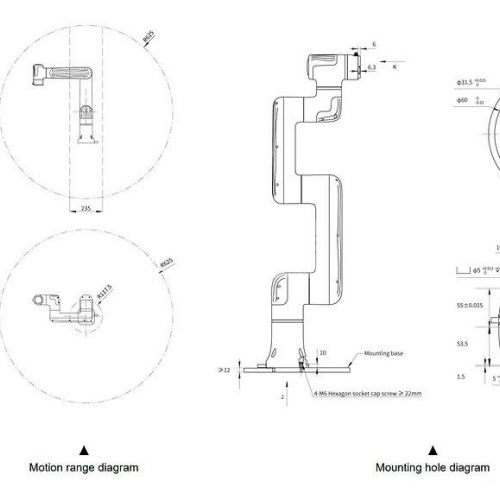
Offre una portata massima di 625 mm, offrendo ampio spazio di lavoro per la manipolazione di oggetti e l'esecuzione di attività.
Nova2 è dotato di un'interfaccia intuitiva che semplifica la programmazione e il controllo. Offre molteplici opzioni di programmazione, tra cui un'interfaccia grafica per un funzionamento intuitivo e un sistema di programmazione basato su blocchi simile a Scratch. Ciò consente agli utenti di tutti i livelli di esperienza di programmare e personalizzare facilmente le azioni del robot in base alle loro esigenze specifiche. Offre molteplici opzioni di programmazione, tra cui l'interfaccia grafica (come scratch), lo scripting utilizzando linguaggi di programmazione (LUA) o API (C, C#, Python, Kotlin...) e la possibilità di insegnare al robot spostandolo manualmente.
Inoltre, Nova2 è compatibile con vari accessori e periferiche, consentendo un'ulteriore personalizzazione ed espansione delle sue capacità. Può essere perfettamente integrato nelle configurazioni e nei flussi di lavoro esistenti, migliorando la produttività e l'efficienza.
La sicurezza è una priorità con Nova2, poiché incorpora funzionalità avanzate come il rilevamento delle collisioni e le capacità di arresto di emergenza. Queste misure di sicurezza garantiscono un ambiente di lavoro sicuro e proteggono sia il robot che gli operatori.
| Peso | 11 kg (24,3 libbre) | |
| Carico utile massimo | 2 kg (4,4 libbre) | |
| Raggio di lavoro | 625 mm (24,6 pollici) | |
| Velocità massima del TCP | 1,6 m/s (63 pollici/s) | |
| Ripetibilità | ±0,05 mm | |
| Gamma di movimento | J1 | ±360° |
| J2 | ±180° | |
| J3 | ±156° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| Velocità massima del giunto | J1/J2/J3 | 135°/s |
| J4/J5/J6 | 135°/s | |
| Fine I/O | DI/FARE | 2 ingressi |
| RS485 | Supportato | |
| Classificazione IP | IP54 | |
| Rumore | 65 dB(A) | |
| Intervallo di temperatura | da 0° a 50° C | |
| Orientamento all'installazione | Qualsiasi angolo | |
| Consumo di energia | Tipico | 100W |
| Massimo | 250W | |
| Lunghezza del cavo dal robot al controller | 3 metri (118,1 pollici) | |
| Materiali | Lega di alluminio, plastica acrilonitrile butadiene stirene | |
| Controllore | |||
| Dimensioni | 200 mm x 120 mm x 55 mm (7,9 pollici x 4,7 pollici x 2,2 pollici) | ||
| Peso | 1,3 kg (2,9 libbre) | ||
| Potenza di ingresso | 30~60 V CC | ||
| Potere IO | 24V, Max 2A, Max 0.5A per ogni canale | ||
| Interfaccia IO | DI | 8 ingressi (NPN o PNP) | |
| FARE | 8 ingressi (NPN o PNP) | ||
| AI | 2 ingressi, modalità tensione, 0~10V | ||
| AO | 2 uscite, modalità tensione, 0~10V | ||
| Accensione/spegnimento remoto | Supportato | ||
| Interfaccia di comunicazione | Interfaccia di rete | 2, per la comunicazione TCP/IP e Modbus TCP | |
| USB | 2, per collegare il modulo wireless USB | ||
| 485 Interfaccia | 1, per comunicazione RS485 e Modbus RTU | ||
| Ambiente | Temperatura | da 0° a 50° C | |
| Umidità | ≤95%, senza condensa | ||
| Classificazione IP | IP20 | ||
| Modalità di raffreddamento | Dissipazione passiva del calore | ||
| Modalità didattica | PC、APP(Android、iOS) | ||