


{kind=link}
{kind=link}
{kind=link}
Applicazioni
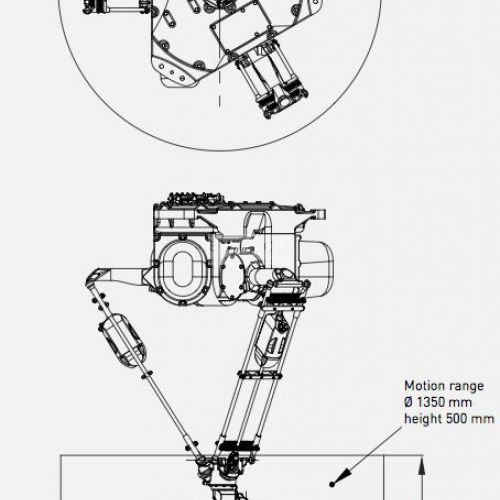
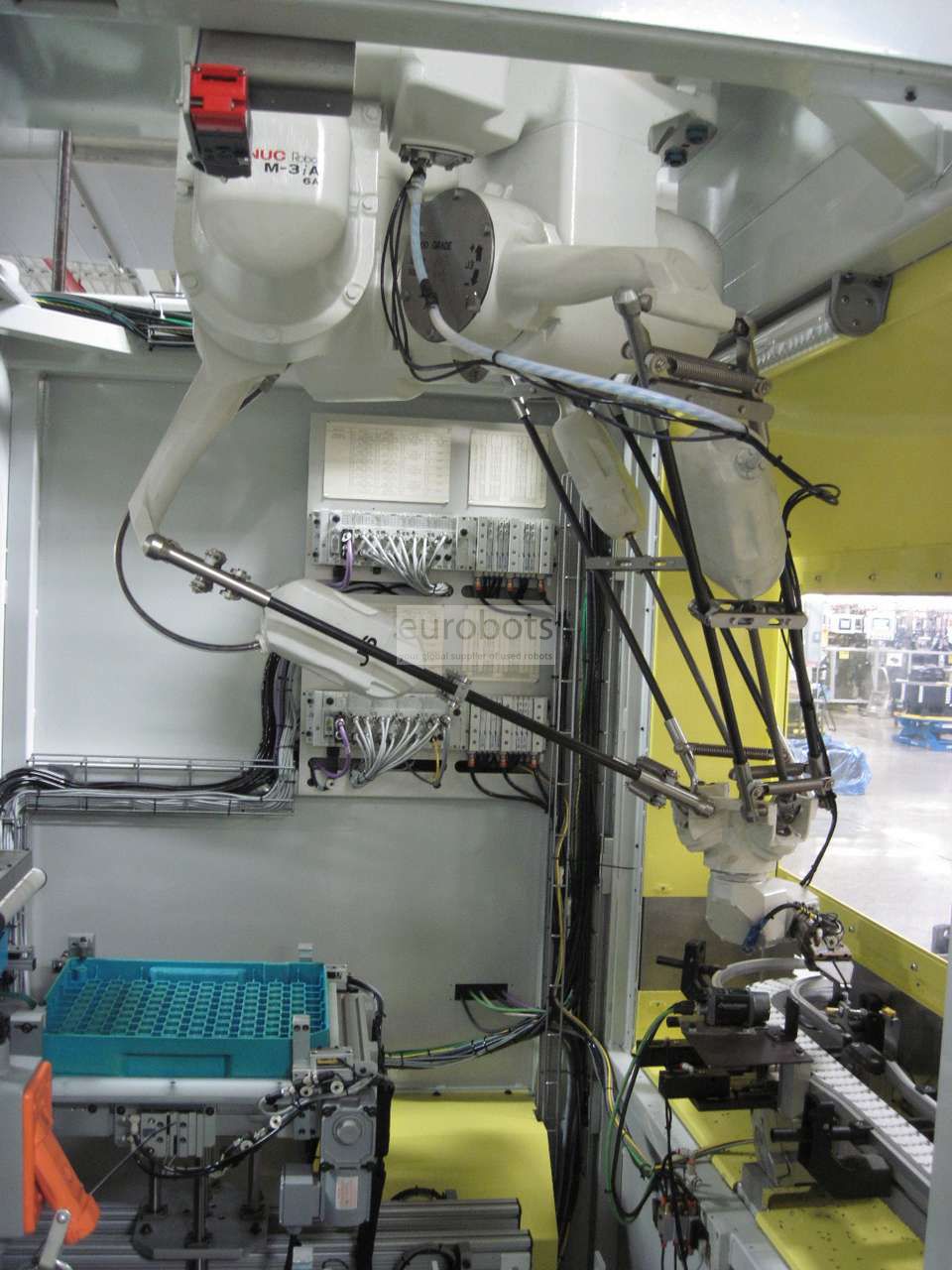
Robot ragno a tre assi ad altissima velocità. Questo robot è utilizzato per il posizionamento di piccoli componenti in pallet preformati. Il Delta FANUC M-3iA / 6A ha una struttura unica con 3 assi di rotazione al polso. Questo M 3iA / 6A è dotato di un payload 6 kg e può essere montato a soffitto (in truttura preformata). Questo fanuc spyder è abbianto al controller super collaudato R30iA.
Caratteristiche del controller R-30iA
Il controller R-30iA ha bisogno di meno di 1 minuto per iniziare (e ancor meno con il software di base). In caso di mancanza di corrente:
- il programma del robot viene riavviato molto più velocemente rispetto a qualsiasi programma basato su PC (non Windows sistema operativo).
- La funzione di ripresa hotstart consente di riavviare in modo sicuro e continuare la produzione dopo interruzione di corrente: non c'è bisogno di rifare l'intero movimento.
Unico controllo di tolleranza curriculum: in caso di interruzione del programma, il robot memorizza automaticamente la sua posizione prima dell'interruzione. Quando il programma continua, esso verifica se il robot è stato spostato al di fuori di una tolleranza prestabilito. Ciò evita movimenti imprevisti e collisioni.
- Aumento up-tempo (disponibilità robot)
Gestione vibrazioni: grazie alle capacità hardware e software avanzate, il controller R-30iA offre molto meglio il controllo delle vibrazioni del robot. Questo riduce notevolmente accelerazione e decelerazione del robot, portando a tempi di ciclo ridotti.
AMPIA GAMMA DI COLLEGAMENTI (USB2), interfaccia PCMCIA ...
Il controller R-30iA dispone di un'interfaccia USB nel pannello frontale e un'interfaccia PCMCIA all'interno del quadro elettrico con 2 connessioni di interfaccia seriale (RS232C, RS422) disponibili.
Questo consente rapide ed economiche di back-up e ripristino dei dati e programmi.
Il FANUC iPendant è un terminale di programmazione intelligente ed è disponibile di serie (ad eccezione di PaintTool). Touch screen è disponibile come opzione.
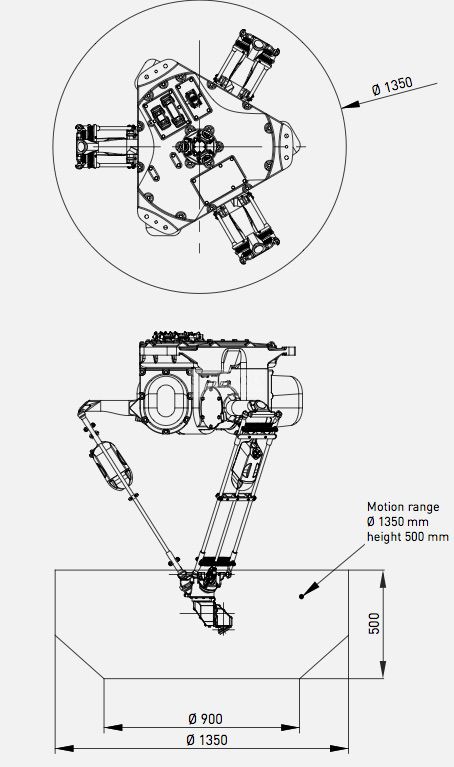
Specifiche robot:
Robot Movimento Velocità
Movimento degli assi in gradi: