ファナック LRMate 100iB
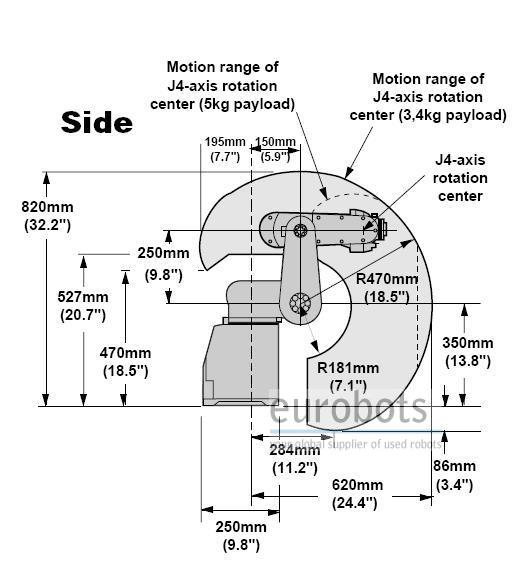
This robot comes with a RJ3iB control system. The LRMate 100i is a five-axis electric servo-driven robot designed for precision machine loading and unloading, welding, and material handling. Extremely rigid, five-axis, electric servo-driven robot. Is tabletop sized with a small footprint 380mm (14.9") width x 470mm (1 8.5) height x 320mm (1 2.6") depth for placement for tight installation. The LR Mate series is FANUC Robotics’ latest-generation, electric servo-driven family of mini robots designed for precision machine load/unload, material handling, material removal, assembly, and lab testing applications. The robot’s small size, dexterity and high speed make it the perfect solution for a wide variety of industrial and commercial applications..
RJ3iB Controller features
- R-J3iB Mate Controller features low voltage I/O: 20 inputs (8 dedicated), 16 outputs (4 dedicated) and 4 inputs at end-of-arm connector.
- R-J3iB Mate Controller supports FANUC Robotics KAREL application software and standard FANUC Robotics I/O modules.
- FANUC Sensor Interface serial communications software allows robot to exchange data with third party devices such as bar code readers, vision systems and PCs.
- Data Transfer Function serial communications software allows robot two-way data exchange with a PC; users can control robot actions through VB graphical interface.
Robot Info
- Maximum Load of Robot: 3Kg
- Maximum Reach: 620 mm
- Repeatability: 0,04 mm
- Controller: RJ3iB
Robot Motion Speed
- Axis 1: 240º/s
- Axis 2: 270º/s
- Axis 3: 270º/s
- Axis 4: 330º/s
- Axis 5: 480º/s
Robot Applications
- Machine load/unload
- Material handling
- Testing and sampling
- Electronics/Cleanroom
- Parts cleaning/washing
- Assembly
- Material removal
- Packing
- Education




{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
Last updated: 20 Feb, 2025