Fanuc S-420iF S420iF
Baujahr 1999. Der Fanuc S-420iF ist ein sechs Achse-Roboter, der eine reduzierte Nutzlast und größeren Arbeitsumschlag, passend in der Hauptrolle zeigt, um Anwendungen zu behandeln. Ausgestattet mit dem RJ2 Kontrolleur 16 Digitaleingänge/Produktionen wird die S-420i Linie der Robotertechnik von FANUC von Robotern für die maximale Leistung und Zuverlässigkeit im Automobilkörpergeschäft konstruiert und wird durch unsere umfassende Anwendungstechnologie und Netz des Dienstes/Teile unterstützt. Der S-420i zeigt einen einzigartigen einheitlichen Kontrolleur, sechs-Achsen Modulgebäude und ein flexibles, elektrisches servo-getriebenes Design für schnellaufende und schwere Prozesse in der Hauptrolle.
Vorteile * erlaubt Arbeitsumschlag, von großen Herstellungen * in einer Prozession zu gehen, Modulroboter-Design erlaubt, dass Konvertierung ein Modell zu einem anderen * bildet Vereinigter mechanischer Einheits- und Roboter-Kontrolleur reduziert Bodenfläche, die Verdrahtung des Punkts-zu-Punkt und Installierungskosten * Minimale mechanische/elektrische Teile vergrößern Zuverlässigkeit * Hohe Bewegungsgeschwindigkeiten reduzieren Zeit zwischen Schweißstellen * 360 Grad-Achse 1 Folge * Benutzerlinien der Macht/Signals/Luft, die inner sind, sich für die vergrößerte Zuverlässigkeit * "leicht zu bewaffnen", und Gebrauch-Anwendung zu lernen, die Pakete * "SCHNELLE Änderung" Elektronik-Kabinett programmiert, reduzieren Ausfallzeit auf weniger als 15 Minuten * Niedriges Massenarm-Design erlaubt die Hochleistungspositionierung * Bewiesenes Arm-Design in mehr als 13,000 S-420 Roboter-Installierungen.
Flexibilitätseigenschaften * erlauben Verlängerungsarm, schweres Nutzlast-Handgelenk, Keil-Sockel, Verminderungsverhältnis und balancer Module einfache Roboter-Konvertierung zur einzelnen Punkt-Schweißstelle, strecken Gestell, langer Arm oder schwere Aufgabe-Typen * Flexibles und erweiterbares Eingabe/Ausgabe-System inner dem Kontrolleur * Verteilte Eingabe/Ausgabe-Blöcke, um telegraphierende Mechanische Eigenschaften * zu reduzieren, stellt Mechanisches Gebäude die genaue Positionierung zur Verfügung, und hohe Bewegungsgeschwindigkeit * Direkt treiben alle Äxte voran läuft auf höhere Zuverlässigkeit und reduzierte Wartung * hinaus RV Geschwindigkeitsreduziermaschinen stellen glatte Bewegung mit allen Geschwindigkeiten und einem langen Leben * Einfaches Moduldesign mit wenigen Bestandteilen * zur Verfügung Gesiegelte Lager und Antriebe stellen Schutz zur Verfügung und verbessern Zuverlässigkeit * Absolute Reihe encoder, * einstellend, Handgelenk-Achse-Drehmoment und Trägheit erlauben abgeschätzte Bewegungsgeschwindigkeit mit großen Pistolen/Werkzeugen * Einzigartige hohle RV Geschwindigkeitsreduziermaschinen vereinfachen Kabelführung * Pressen entfernte Gestell-Maschinenbediener-Tafel Zusammen reduziert Gang und Bodenfläche-Voraussetzungen * Taille bestieg, dass Gabelstapler-Klammern für peripherisch und Schweißstelle-Transformator steigend * Kompaktarm-Auswahl für den nahen Abstand von Einheiten verwendet werden können
Roboter-Info
· Maximale Last des Roboters: 120 Kg
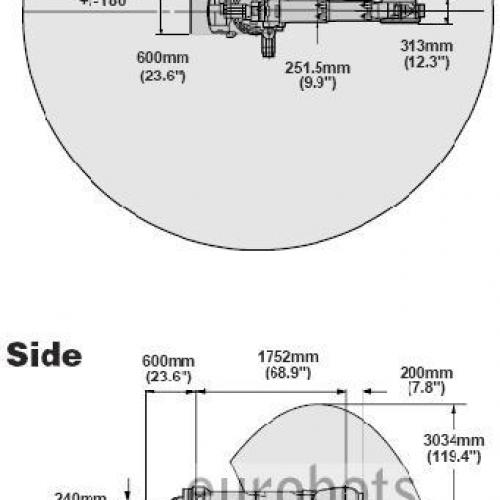
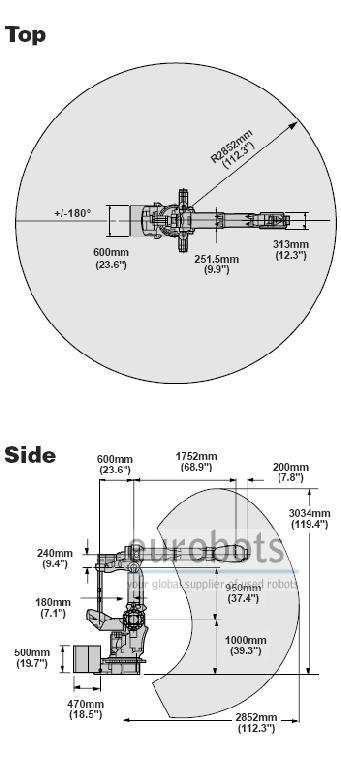
· Maximale Reichweite: 2450/2850 Mm
· Repeatability: 0,4 Mm
· Kontrolleur: RJ2
Roboter-Bewegungsgeschwindigkeit
· Axt 1: 100 º/s
· Axt 2: 110 º/s
· Axt 3: 100 º/s
· Axt 4: 210 º/s
· Axt 5: 150 º/s
· Axt 6: 210 º/s
Roboter-Anwendungen:
· Das Punkt-Schweißen
· Das Neigen drücken
· Das materielle Berühren
· Das Maschinenneigen
· Palettieren






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
Zuletzt aktualisiert: 3 Apr, 2025