





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Anwendungen
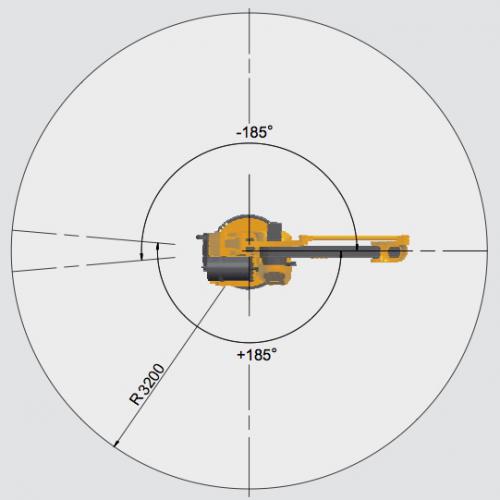
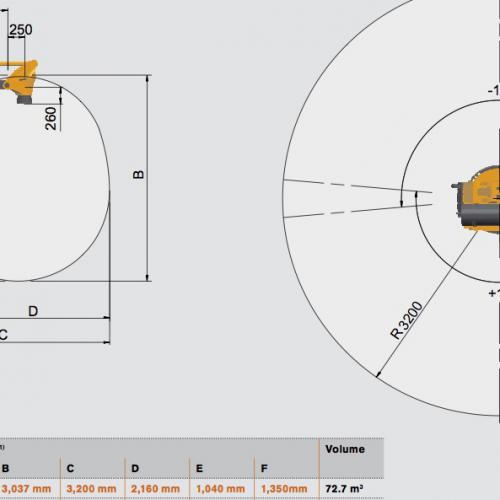
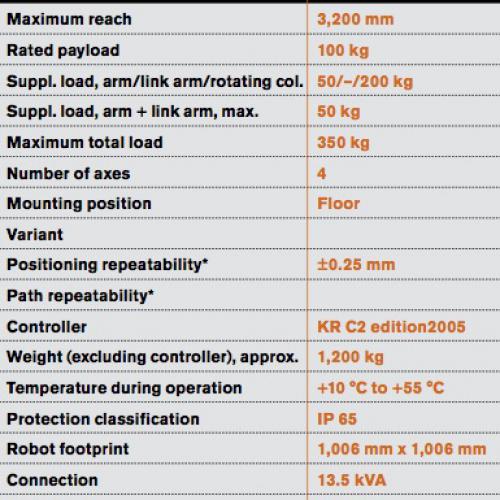
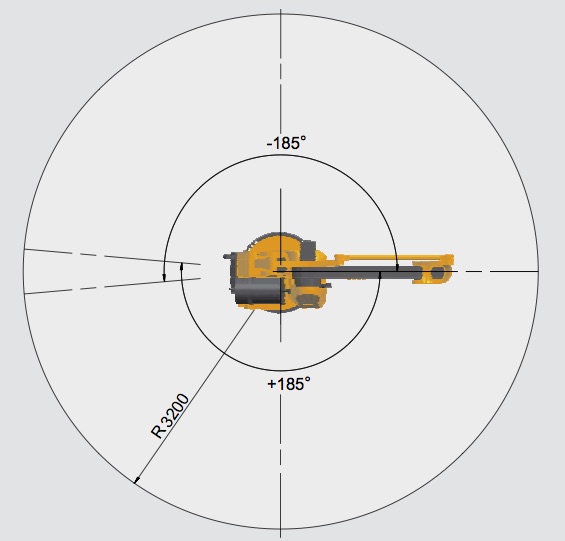
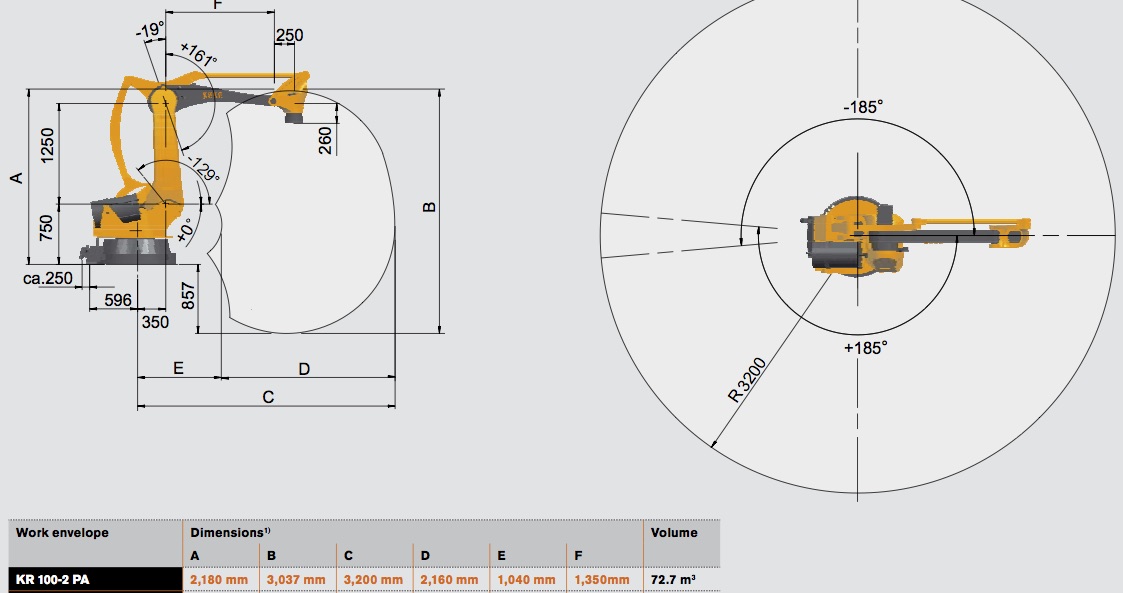
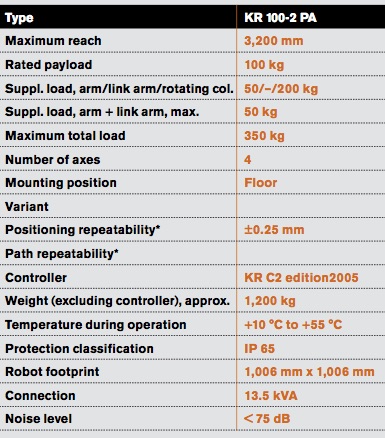
4-Achs-Palettierroboter. Schnell und robust. Hervorragende Arm Reichweite von 3200 mm und einer Nutzlast von 100 kg. Achsenzahl 3 Arm aus Kohlefaser eine große Belastung Haltbarkeit. Ausgestattet mit dem KRC2 ED05 Schrank und spezielle Palettieren Software, die vor allem die Programmierung erleichtert.
KR C2 edition2005 Funktionen
Die Steuerung KR C2 edition2005 (ED05) entsprechend Ihren individuellen Anforderungen zusammengebaut, Standard-PC-Komponenten und Antriebstechnik, der ihren Wert auf dem Gebiet der Automatisierung bewährt hat. Dies garantiert Ihnen eine hohe Zuverlässigkeit und kontinuierlichen Zugang zu den Vorteilen der innovativen Technologie.
Beispielsweise ist es möglich, zwei externe Achsen im Grundgehäuse integriert werden. In Verbindung mit einem Aufsatzschrank, so viele wie sechs externe Achsen gesteuert werden.
Der Regler zeichnet sich aufgrund seiner einfachen Wartung, gute Zugänglichkeit, modularer Aufbau und servicefreundliche Konstruktion, die Komponenten ermöglicht es schnell und einfach ausgetauscht werden. Eine breite Palette von Diagnose- und Fehlerfunktionen, wie zB die Fernwartung über das Internet, zusammen mit zahlreichen Erweiterungsmöglichkeiten und ein umfassendes Sicherheitskonzept runden das Leistungsspektrum für die KR C2 edition2005 angeboten, so dass Sie alles, was Sie benötigen, um Ihre Produktion zu optimieren.
Eigenschaften und Vorteile
• Einheitliche Steuerungskonzept für alle Roboter KUKA - von niedrigen Traglasten bis zum Schwerlast Kategorie - bedeutet Planungssicherheit und Austauschbarkeit
• "Plug and Play" Funktionalität ermöglicht eine schnelle Inbetriebnahme
• Service-bewährte Technologie und Standard-PC-Komponenten sorgen für eine maximale Verfügbarkeit bei minimalem Wartungs
• Modularer Aufbau ermöglicht eine Vielzahl von kundenspezifischen Hard- und Software-Erweiterungen
• Effiziente Schnittstellen und eine hohe Kompatibilität aufgrund PC-basierte Technologie
• Vernetzte Steuerungen, die miteinander in Echtzeit kommunizieren kann es möglich machen, eine Reihe von synchronisierten Roboter zusammen auf einem einzigen Werkstück zu arbeiten,