











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Области применения
Год выпуска- 2000. Это шестиосевой промышленный робот, устанавливаемый на пол или потолок. Он подходит для работы в непрерывном режиме с контролируемой траекторией.Основные области применения:
- стыковка прессом
- станочная стыковка
- погрузка-разгрузка
- загрузка товаров на поддоны
Благодаря огромной рабочей зоне эти роботы идеально подходят для погрузки и разгрузки даже крупных компонентов на линиях прессов.
Оборудован контроллером KRC1 на базе Windows95.
Спецификации контроллера KRC1:
· компьютер с возможностью удаленного управления и организации сети
· стандартные CAN/DeviceNet и Ethernet. Гнезда для распространенных магистральных систем (например, INTERBUS-S,FIPIO).
· функция встроенного осциллографа для удаленной диагностики и программирования
· функция конфигурации движения для настройки оптимального взаимодействия между отдельными двигателями робота и быстроты их действия
· гибкий диск и CD-ROM для хранения данных
· возможность работы в режиме «ведущий-ведомый» и возможность удаленной диагностики через Интернету
· простой процесс контроля и программирования при помощи панели управления KUKA(KCP) с графическим интерфейсом Windows95
· компактный складной блок управления
· один контроллер для всех моделей роботов
· эргономичный дизайн панели управления KCP
Характеристики робота:
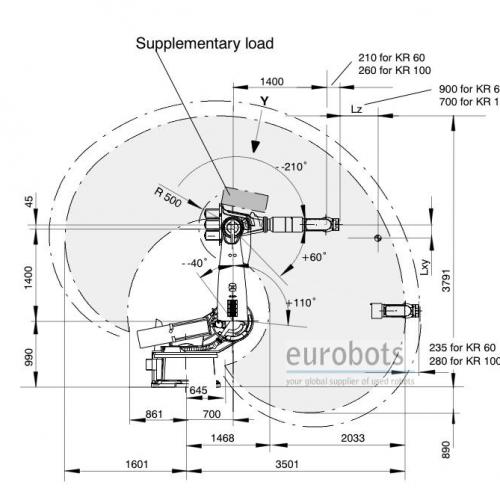
* Максимальная грузоподъемность: 100 кг
* Максимальный радиус действия: 3501 мм
* Точность: 0,40 мм
* Контроллер: KR C1A
Скорость движения:
* Ось 1: 90º/сек
* Ось 2: 90º/сек
* Ось 3: 80º/сек
* Ось 4: 130º/сек
* Ось 5: 140º/сек
* Ось 6: 180º/сек
Области применения:
* стыковка прессом
* станочная стыковка
* погрузка-разгрузка
* загрузка товаров на поддоны