


{kind=link}
{kind=link}
{kind=link}
Области применения
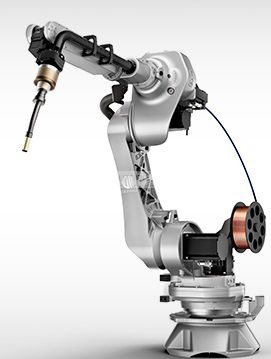
Современная технология Robot Arc4-5-1.95, предназначенная для применения в дуговой сварке, которая оптимизирует процесс и обеспечивает высокую производительность благодаря полым запястьем, который имеет полезную нагрузку 5 кг, досягаемость руки 1951 мм и точность 0,05 мм.
Контроллер C5G использует новейшее поколение APC820 промышленного ПК с процессором Core2 Duo, способным получать высокие характеристики с низким энергопотреблением
Сохранение энергии
• Наименьшее потребление в режиме ожидания, низкое потребление во время работы • Система охлаждения, пропорциональная работе блока управления
• Система восстановления энергосистемы с высокой динамической программой содержания
Гибкость и надежность
Новое поколение полевых шин на основе технологии Hilscher, интегрированное B & R в их удаленном семействе I / O X20, гарантирует гибкий и надежный интерфейс в каждом клиентском приложении. Доступны модульные интерфейсы, такие как цифровой ввод-вывод, аналоговый ввод-вывод и для многих типов датчиков положения, преобразователя и т. Д.
безопасности
Интегрированный в модуль SDM, сертифицированный TUV (двухканальный аварийный останов, разрешающее устройство, включение логического привода) функция блокировки на рычаге робота и функция блокировки для сотрудничества с человеком и роботом
Модульность / расширяемость
Модульная система для приводов до 13 осей в базовом корпусе функция мощности и модель робота
Одновременное управление несколькими роботами
Архитектура аппаратного обеспечения, предназначенная для управления до 16 осями в режиме «multi-arm» с областью применения
3D-офф-лайн программирование с помощью Robosim Pro
Управление несколькими приложениями
Возможность одновременного управления многими приложениями
Открытый контроллер C5G: стать настоящими драйверами движения робота
Это позволяет разрабатывать индивидуальные алгоритмы движения и специальные приложения с использованием датчиков
Доступны основные функциональные возможности программного обеспечения
• Автоматическая идентификация полезной нагрузки: автоматическая идентификация полезной нагрузки для оптимизации движения робота
• Обнаружение столкновений: аварийная остановка робота в случае столкновения для защиты механика и оборудования
• Совместное и синхронизированное движение: координированное и одновременное управление несколькими роботами и вспомогательными осями (линейная дорожка, сервомеханизм, позиционеры и другое прикладное оборудование)
• Конвейер и слежение за датчиком: отслеживание движения деталей на линейных и круглых конвейерах. Точность в следовании по пути с использованием различных типов внешних датчиков
• Совместная мягкая сервотехнология: способность отдельных роботизированных соединений приводить к внешним воздействиям, которые требуются для конкретного применения
• Области вмешательства: регионы различной формы могут быть динамически определены для ограничения рабочего пространства робота
• Абсолютная точность робота: алгоритм адаптации реальной кинематики к теоретической модели, запрограммированной вне линии