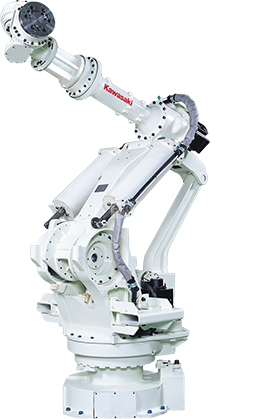
MXE420L结构紧凑,不使用配重,手柄扭矩约为5,488 N.m,由于采用了Kawasaki伺服电机,因此该机器人在6个轴上具有高功率,与手腕的高扭矩一起提供负载的平衡有用的工具法兰安装。这些机器人模型是M系列的一部分,其特征在于先进的发动机技术工程技术,以实现高手腕扭矩和长距离,具有出色的顶部装载处理,非常容易和高精度地举起和处理重物。
E控制器
E控制器结构紧凑,性能可靠,性能卓越,CPU技术先进,可实现更高的生产力和轨迹控制。 Kawasaki AS技术支持广泛的工业应用,使用提供顺序控制的编程语言;为了完全控制16个轴,最多可以扩展10个外部轴。由于其模块化组件和有限的电缆,易于维护和诊断。
- 理想的每个地区的一次能源分配电压
- 更大的扩张能力
- 采用间接冷却系统的封闭结构
- 数字伺服系统
- I / O通道32(最大128)
主要规格
机器人的最大负载:420公斤
轴数:6
最大水平范围:2,778毫米
最大垂直范围:3,170毫米
重复性:±0.5毫米
控制器:E34
运动范围(°)
轴JT1:±180°
轴JT2:+ 90°/ -45°
轴JT3:+ 20°/ -125°
轴JT4:±360°
轴JT5:±110°
轴JT6:±360°
最大速度(°/ s)
轴JT1:80°/ s
轴JT2:70°/ s
轴JT3:70°/ s
轴JT4:80°/ s
轴JT5:80°/ s
轴JT6:120°/ s
机器人应用
机器抚育
物料搬运

{kind=link}