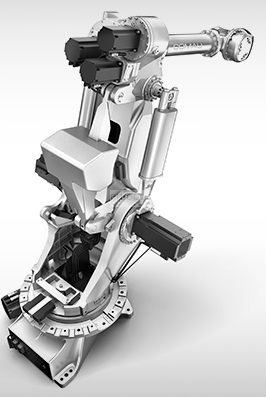
Robot con design a 6 assi con una portata di 2703 mm e una capacità di carico di 650 kg. Questo è un modello potente che garantisce risparmio energetico, riduzione dei costi e maggiore produttività con grado di protezione del polso IP44 / IP65 per l'installazione a pavimento.
Il controllo C5G utilizza l'ultima generazione di PC industriali APC820 con CPU tecnologia Core2 Duo, in grado di ottenere prestazioni elevate con un basso consumo energetico
Risparmio energetico
• Consumo minimo in stand by, basso consumo durante le operazioni • Sistema di raffreddamento proporzionale alle operazioni della centrale
• Rete energetica recupera sistema con un programma ad alto contenuto dinamico
Flessibilità e affidabilità
La nuova generazione di bus eld basati sulla tecnologia Hilscher, integrata da B & R nella loro famiglia I / O X20 remota, garantisce un'interfaccia affidabile e affidabile in ogni applicazione del cliente. Sono disponibili interfacce modulari quali I / O digitale, I / O analogici e per molti tipi di encoder trasduttore di posizione, resolver, ecc.
Sicurezza
Integrato nel modulo SDM, certificato TUV (arresto di emergenza a doppio canale, dispositivo di abilitazione, abilitazione azionamento logico) funzione di frenatura sul braccio del robot e funzione di interblocco per la cooperazione uomo-robot
Modularità / Espandibilità
Sistema modulare per azionamenti fino a 13 assi nella funzione di base dell'armadio e il modello del robot
Gestione simultanea di diversi robot
Architettura hardware progettata per gestire fino a 16 assi nella con gurazione "multi-braccio" con box applicativo
Programmazione offline 3D con Robosim Pro
Gestione di più applicazioni
Possibilità di gestire molte applicazioni contemporaneamente
C5G open controller: diventare i veri motori del movimento del robot
Permette lo sviluppo di algoritmi di movimento personalizzati e applicazioni speciali con l'uso di sensori
Principali funzionalità del software disponibili
• Identificazione automatica del carico utile: identificazione automatica del carico utile per ottimizzare il movimento del robot
• Rilevamento collisione: arresto di emergenza del robot in caso di collisione per proteggere il meccanico e l'attrezzatura
• Movimento cooperativo e sincronizzato: gestione coordinata e simultanea di diversi robot e assi ausiliari (pista lineare, servo-pistola, posizionatori e altre attrezzature di applicazione)
• Conveyor and Sensor Tracking: tracciamento di parti in movimento su trasportatori lineari e circolari. Precisione nel seguire il percorso utilizzando diversi tipi di sensori esterni
• Tecnologia Joint Soft Servo: la capacità dei singoli giunti del robot di cedere alle forze esterne richieste dall'applicazione specifica
• Regioni di interferenza: le regioni di varie forme possono essere definite dinamicamente per limitare lo spazio di lavoro del robot
• Robot Absolute Accurancy: algoritmo per l'adattamento della cinematica reale al modello teorico programmato off-line



{kind=link}
{kind=link}
{kind=link}