Robor à charge utile élevée, fiable et robuste, de fiabilité et de flexibilité de haute performance.
Contrôleur Rj3. Peu de temps de travail. Année de fabrication 2000-2001
-
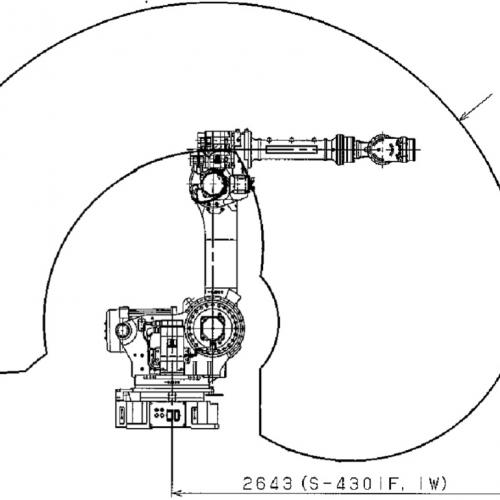
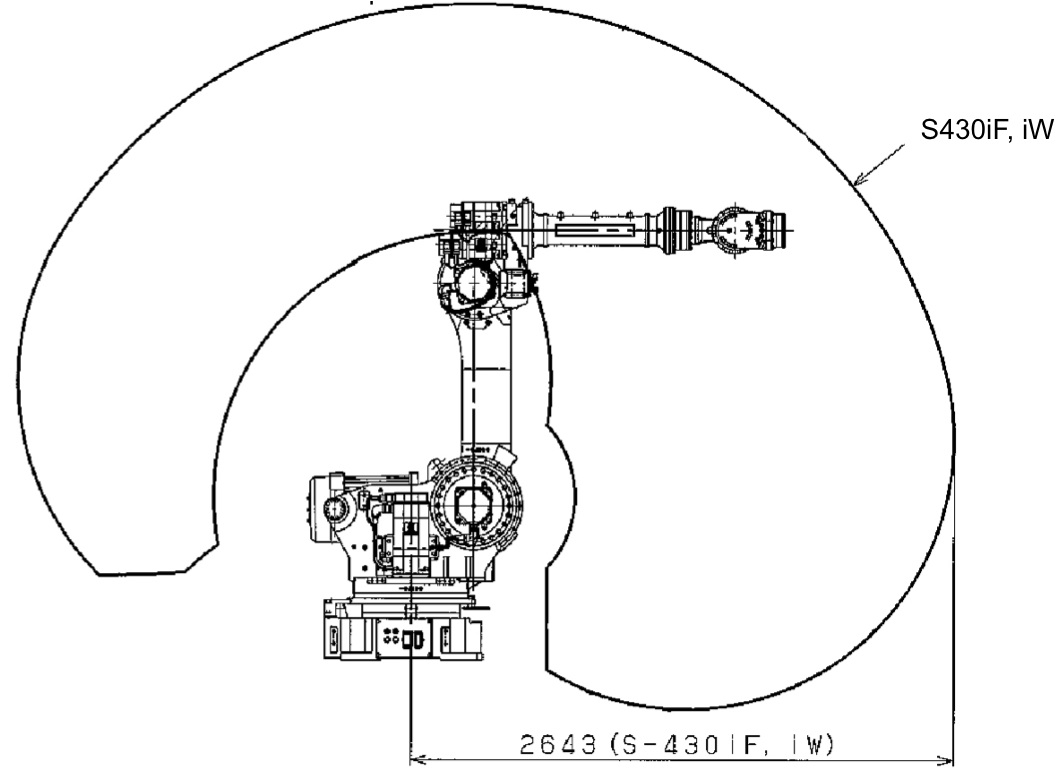
Etendue maximale de ce robot de classe (2643mm) et tourner sur le mécanisme permettant 2,1 fois plus d’espace de manoeuvre que le modèle précédent.
-
Le robot peut tourner autour de son axe J1 à 360 degrés, permettant un fonctionnement dans toutes les directions.
-
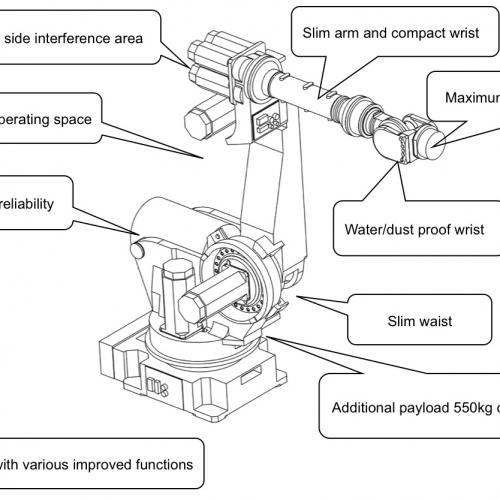
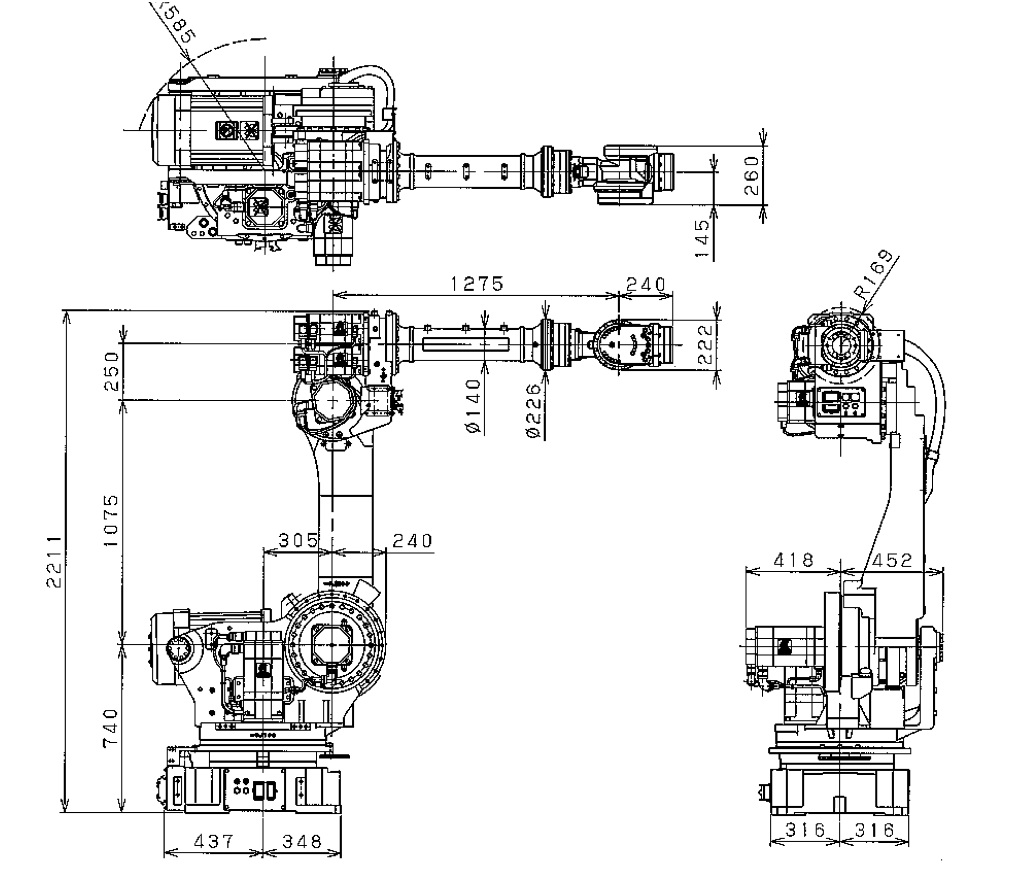
Poignet du bras mince et compact
-
Récepteur résistant à l’eau / poussière amélioré. IP67 équivalent.
-
Le mouvement de retour permet un fonctionnement à l 'arrière. Le bras J3 de la côté supérieure mis pour la commodité du client.
-
Petit rayon de l'ingérence et de petites zone d’interférence arrière côté permettant l'installation dans des espaces étroits.
-
Grand espace de manoeuvre grâce à l’étendue du bras le mieux adaptée de J2, J3.
-
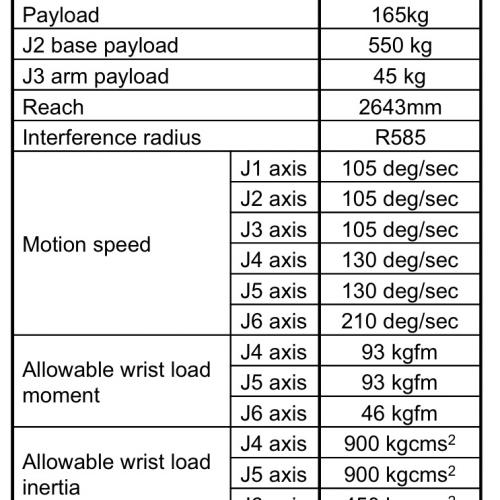
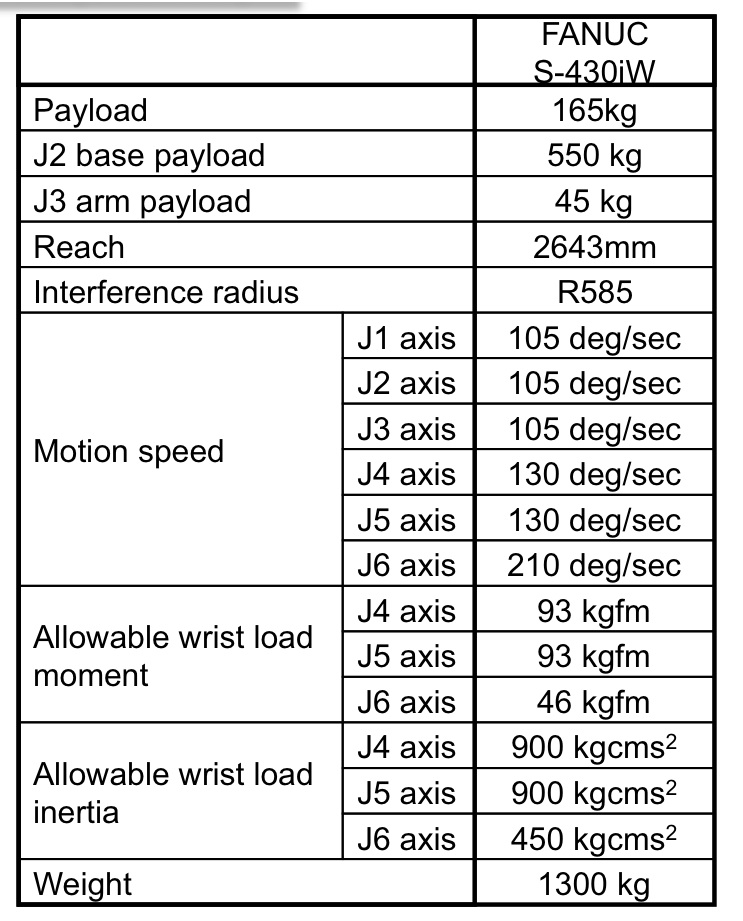
Charge utile maximale au poignet est augmentée à 165 kg (S-430iW).
-
550 kg de charge utile supplémentaire sur la base de J2 et 20 kg sur le bras J3.
-
La vitesse de l’axe J1 est augmentée à 105deg/sec (S-430iW).
-
Remplacement facile pour les moteurs du poignet et les câbles.
-
Câbles aériens, de signalisation et Profibus à l’intérieur de l'unité mécanique.
-
Le nouveau contrôleur R-J3 donne un plus de vitesse et de mouvement calme et sans vibrations.
-
Le contrôleur R-J3 suit la même opération et utilise le même pendentif teach en tant que le contrôleur R-J2. L'unité de contrôle peut être combinée avec l'unité mécanique comme dans le passé.
-
Entretien rapide et facile pour le contrôleur R-J3.
Info Robot:
-
Charge maximale du robot: 165Kg.
-
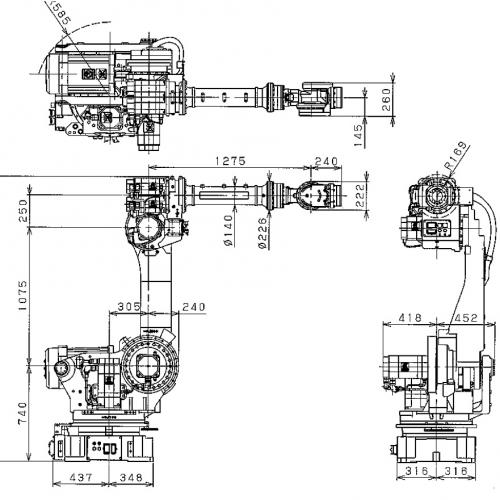
Etendue maximale: 2643 mm.
-
Répétabilité: 0,3 mm.
-
Contrôleur:RJ3
Vitesse de mouvement du robot:
-
Axe 1: 105º/seg
-
Axe 2: 90º/seg
-
Axe 3: 105º/seg
-
Axe 4: 130º/seg
-
Axe 5: 130º/seg
-
Axe 6: 210º/seg
Applications du robot:
-
Soudage par points
-
Intendant presse
-
Manutention
-
Intendant machine
-
Palettisation
-
Assemblage






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}