





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Funções
Robô industrial seis eixo originalmente concebido para fins de soldagem a arco. Alta precisão e velocidade são características marcantes deste robô
Como este robô industrial de alta velocidade tem um pulso normal em oposição ao pulso oco, ele também pode perfeitamente ser usado para aplicações de manipulação que exigem tempos de ciclo curtos e alta precisão.
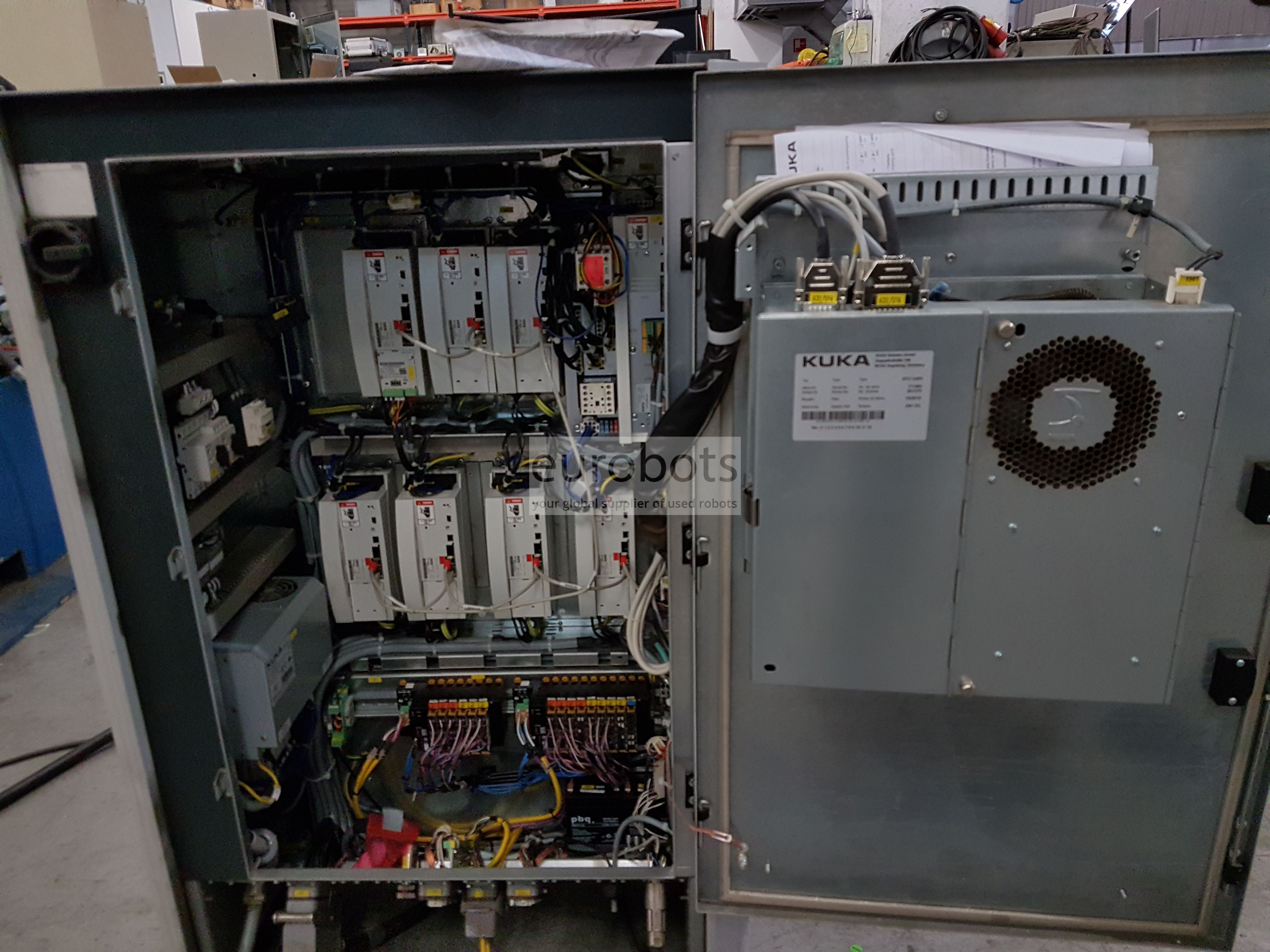
Equipado com o controlador KR C2 Ed2005.
Características edition2005 KR C2
O edition2005 controlador KR C2 (ED05) é montado de acordo com as suas necessidades individuais, usando componentes de PC padrão e tecnologia de unidade que provou o seu valor no campo da automação. Isto garante que você alta confiabilidade e acesso contínuo aos benefícios da tecnologia de ponta.
Por exemplo, é possível integrar até dois eixos externos no armário básico. Em conjunto com um armário montado na parte superior, até seis eixos externos podem ser controladas.
O controlador se destaca devido à sua manutenção simples, boa acessibilidade, estrutura modular e design de fácil manutenção, o que permite que os componentes a serem trocados rapidamente e facilmente. Uma vasta gama de funções de diagnóstico e solução de problemas, tais como a manutenção remota através da Internet, juntamente com inúmeras opções de expansão e uma abrangente conceito de segurança completam a gama de serviços oferecidos para a edition2005 KR C2, dando-lhe tudo o que você precisa para otimizar sua produção.
Características e vantagens
• conceito de controle uniforme para todos os robôs KUKA - de baixas cargas úteis até a categoria pesado - significa planejamento confiável e permutabilidade
• "Plug and play" funcionalidade permite o rápido start-up
• tecnologia comprovada-Service e componentes de PC padrão garantir o máximo de disponibilidade com um mínimo de manutenção
• O design modular permite uma ampla gama de expansões de hardware e software personalizado
• interfaces eficientes e alta compatibilidade devido a tecnologia baseada em PC
• controladores em rede que podem se comunicar uns com os outros em tempo real, torná-lo possível para um número de robôs sincronizados para trabalhar em conjunto em uma única peça
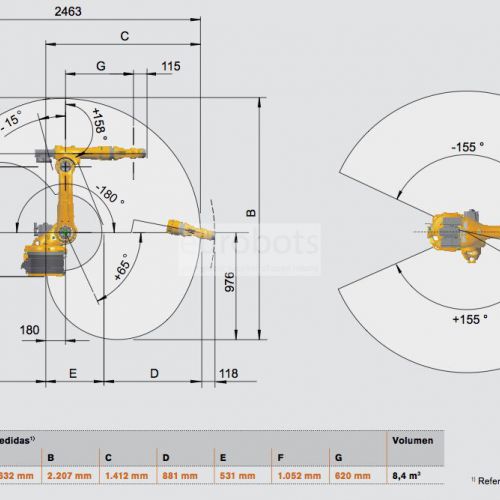
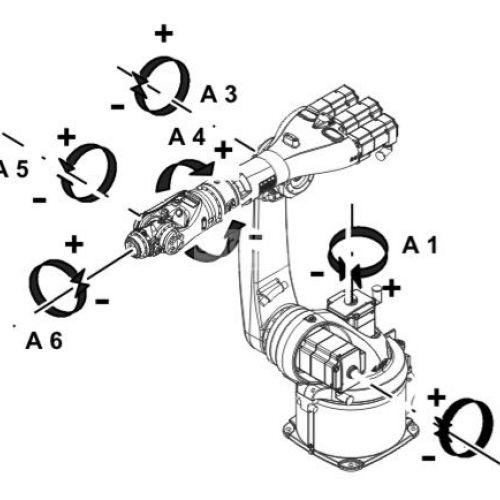
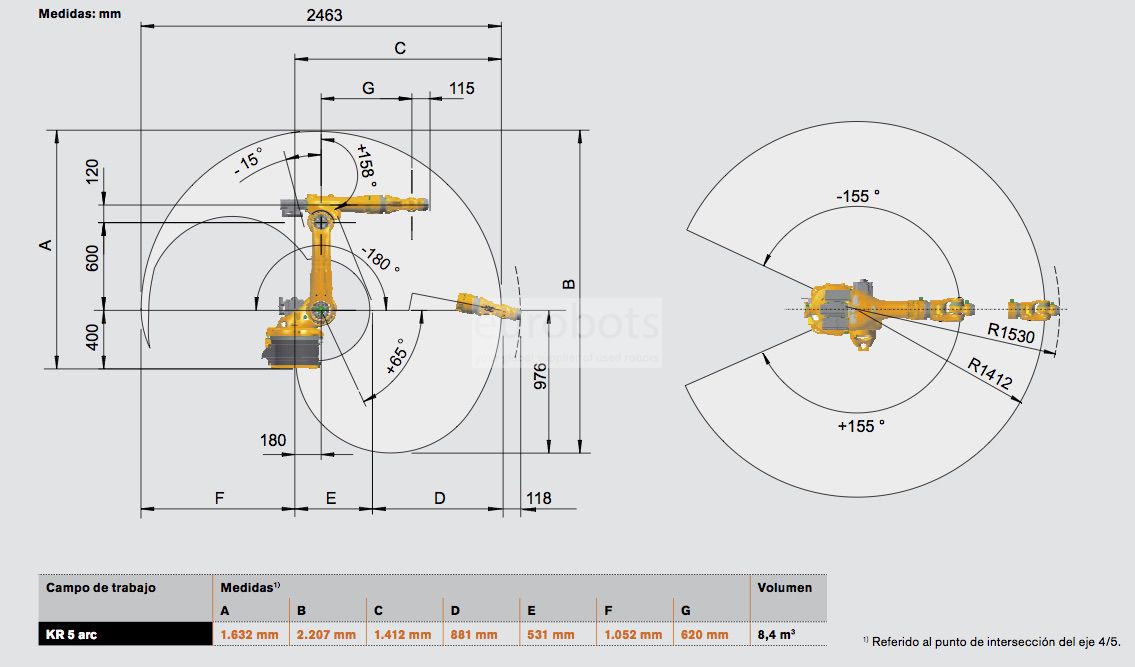
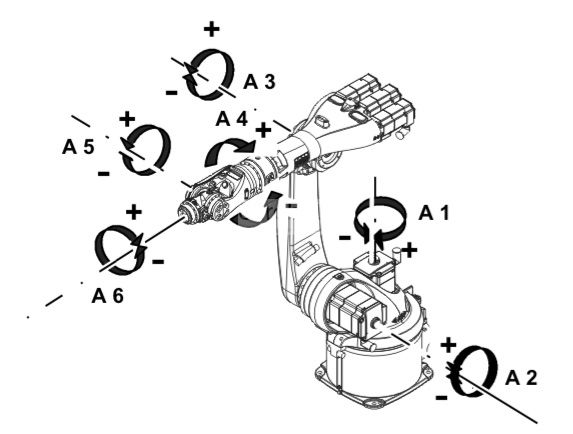
Especificações principais
Amplitude de movimento
Velocidade de movimento do robô em º / s (RMS)