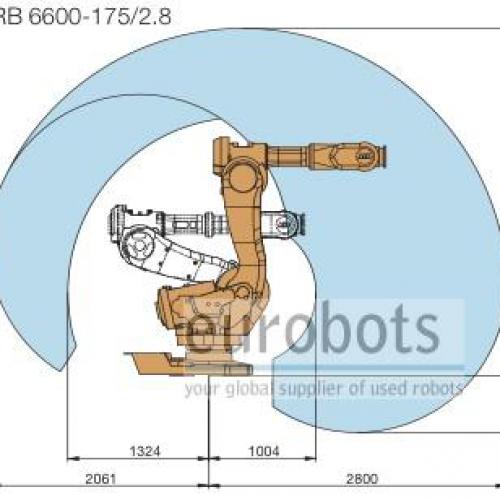
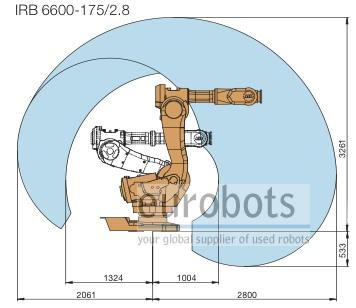
该机器人2007年生产。五个大载荷机器人版本,提取能力高达225 kg, 到达距离高达 3200 mm, 手腕扭矩高达 1320 Nm。它是著名的IRB6400的改进。更高的速度和全新的外形实现了2、3轴的更大的工作范围。单弹簧平衡系统延用了KUKA和FANUC的理念(Kuka series 2000 and Fanuc R2000)。IRB6600带有内置的服务信息系统,能为它实现更简便的服务和维护。
配有最新的IRC5控制器。
IRC5是ABB的第五代机器人控制器。它的运动控制技术TrueMove & QuickMove,对于机器人在精度、速度、周期时间、可编程性及与外部设备同步性等方面的性能是关键。
基于先进的动态模型,IRC5优化了机器人的性能,以获得可能的最短周期时间(QuickMove)和最精确的路径精度(TrueMove)。 可以自动地实现独立速度路径一起、可预计的高性能动作,而不需要编程者调节。
RAPID编程语言
简单、灵活和强劲的完美组合。RAPID是一个真正的无限的语言,具有许多先进的特点和对许多过程应用的强大支持。
通讯
IRC5支持艺术级的I/O现场总线,在任何现场网络都是一个很好的节点。传感器接口、远程磁盘存取和插口信息都是众多网络特征的例子。
机器人信息:
机器人运行速度:
机器人的应用范围:








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}