ABB IRB6400S Shelf
ABB 6400 Shelf - è il robot a "scaffale" ed è equipaggiato con il moderno sistema di controller S4CPlus. Disponibile per l'asservimento presse, per lo scarico di pezzi da distanza importanti è vincente per il suo raggio e per la sua portata al polso. Il manipolatore ha 6 assi ed il sistema di controllo S4C PLUS offre corti e precisi tempi di ciclo, rapidi change-over e consistenti processi di alta precisione.
La gamma dei robot 6400 dispone di diverse lunghezze di braccio e categorie di carico che sono controllate dalla funzione di controllo modello base QuickMove sempre in grado di assicurare la massima accelerazione, un percorso accurato e una certa velocità in tutta l’area di lavoro.
Il sistema di controllo S4Cplus consente un maggior controllo del movimento. E’ dotato di controllo basato su modello dinamico, QuickMove per i cicli a tempo corto e la funzione TrueMoveper un maggior percorso di precisione seguito dall’abilità indipendente della velocità del robot. La capacità del sistema di configurazione del S4Cplus e la potenza del rapid programming language rendono il controllo utilizzabile per una vasta gamma di applicazioni. Due canali Ethernet forniscono un più facile servizio vi è oltre un factory network. Field bus e canali seriali per PLC e la connessione. Il controllo supporta TPC/IP, DSN e altri protocolli. La procedura RAP e disponibile per il controllo e il monitoraggio.
Info robot :
- Numero degli assi: 6
- Massimo carico al polsot: 120Kg.
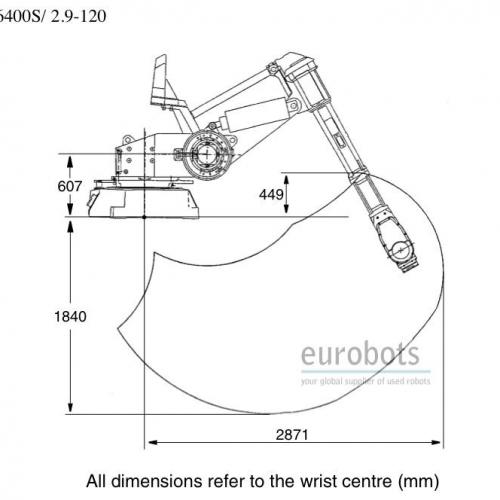
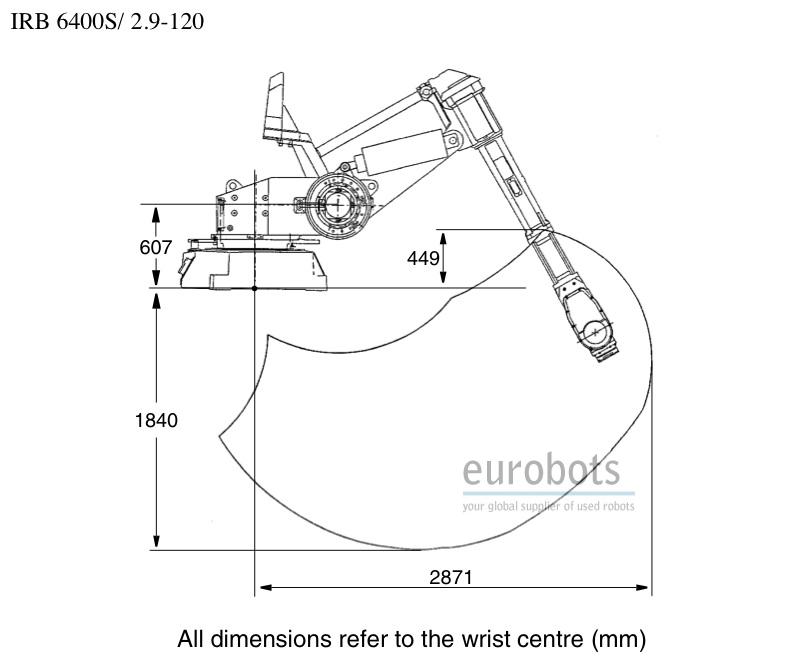
- Massima estensione: 2900 mm.
- Ripetibilitá : 0,15 mm.
- Controller: M2000 S4CPlus.
Velocitá di movimento gradi/secondo:
- Asse 1: 100º/sec
- Asse 2: 100º/sec
- Asse 3: 100º/sec
- Asse 4: 210º/sec
- Asse 5: 150º/sec
- Asse 6: 210º/sec
Applicazioni del robot:
- Saldatura
- asservimento presse
- Material handling
- Machine tending
- Pallettizzazione
- Assemblaggio




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
Ultimo Aggiornamento: 22 Apr, 2025