Kommerzieller Cobot DOBOT NOVA 2
Der DOBOT Nova2 ist ein vielseitiger und kompakter Roboterarm, der für Einzelhandels- und Gewerbezwecke entwickelt wurde.
Der Nova2 verfügt über eine Nutzlastkapazität von 2 kg, sodass er verschiedene Aufgaben präzise bewältigen kann. Ganz gleich, ob es sich um Montage, Pick-and-Place, Tests oder andere komplizierte Vorgänge handelt, der Nova2 bietet die nötige Stärke und Geschicklichkeit.
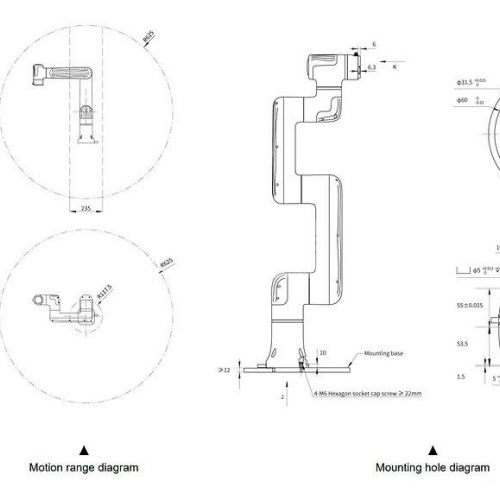
Er bietet eine maximale Reichweite von 625 mm und bietet damit ausreichend Arbeitsraum für die Handhabung von Gegenständen und die Ausführung von Aufgaben.
Der Nova2 verfügt über eine benutzerfreundliche Oberfläche, die die Programmierung und Steuerung vereinfacht. Es bietet mehrere Programmieroptionen, darunter eine grafische Oberfläche für intuitive Bedienung und ein blockbasiertes Programmiersystem ähnlich Scratch. Dadurch können Benutzer aller Erfahrungsstufen die Aktionen des Roboters einfach programmieren und an ihre spezifischen Anforderungen anpassen. Es bietet mehrere Programmieroptionen, darunter die grafische Oberfläche (wie Scratch), Skripterstellung mithilfe von Programmiersprachen (LUA) oder API (C, C#, Python, Kotlin...) und die Möglichkeit, dem Roboter durch manuelles Bewegen etwas beizubringen.
Darüber hinaus ist der Nova2 mit verschiedenen Zubehör- und Peripheriegeräten kompatibel, was eine weitere Anpassung und Erweiterung seiner Funktionen ermöglicht. Es lässt sich nahtlos in bestehende Setups und Arbeitsabläufe integrieren und steigert so die Produktivität und Effizienz.
Sicherheit hat beim Nova2 Priorität, da er über erweiterte Funktionen wie Kollisionserkennung und Notstoppfunktionen verfügt. Diese Sicherheitsmaßnahmen sorgen für eine sichere Arbeitsumgebung und schützen sowohl den Roboter als auch die Bediener.
| Gewicht | 11 kg (24,3 Pfund) | |
| Maximale Nutzlast | 2 kg (4,4 Pfund) | |
| Arbeitsradius | 625 mm (24,6 Zoll) | |
| Maximale Geschwindigkeit von TCP | 1,6 m/s (63 Zoll/s) | |
| Wiederholbarkeit | ±0,05 mm | |
| Bewegungsfreiheit | J1 | ± 360° |
| J2 | ± 180° | |
| J3 | ± 156° | |
| J4 | ± 360° | |
| J5 | ± 360° | |
| J6 | ± 360° | |
| Maximale Gelenkgeschwindigkeit | J1/J2/J3 | 135 °/s |
| J4/J5/J6 | 135 °/s | |
| I/O beenden | DI/DO | 2 Eingänge |
| RS485 | Unterstützt | |
| IP-Bewertung | IP54 | |
| Lärm | 65 dB(A) | |
| Temperaturbereich | 0° bis 50° C | |
| Installationsausrichtung | Jeder Winkel | |
| Energieverbrauch | Typisch | 100W |
| Maximal | 250W | |
| Kabellänge vom Roboter zur Steuerung | 3 m (118,1 Zoll) | |
| Materialien | Aluminiumlegierung, Acrylnitril-Butadien-Styrol-Kunststoff | |
| Regler | |||
| Maße | 200 mm x 120 mm x 55 mm (7,9 Zoll x 4,7 Zoll x 2,2 Zoll) | ||
| Gewicht | 1,3 kg (2,9 Pfund) | ||
| Eingangsleistung | 30~60V Gleichstrom | ||
| IO-Leistung | 24 V, max. 2 A, max. 0,5 A für jeden Kanal | ||
| IO-Schnittstelle | DI | 8 Eingänge (NPN oder PNP) | |
| TUN | 8 Eingänge (NPN oder PNP) | ||
| KI | 2 Eingänge, Spannungsmodus, 0~10V | ||
| AO | 2 Ausgänge, Spannungsmodus, 0~10V | ||
| Ferngesteuertes Ein-/Ausschalten | Unterstützt | ||
| Kommunikationsinterface | Netzwerkschnittstelle | 2, für TCP/IP- und Modbus TCP-Kommunikation | |
| USB | 2, zum Anschluss des USB-Funkmoduls | ||
| 485-Schnittstelle | 1, für RS485- und Modbus-RTU-Kommunikation | ||
| Umfeld | Temperatur | 0° bis 50° C | |
| Feuchtigkeit | ≤95 %, nicht kondensierend | ||
| IP-Bewertung | IP20 | ||
| Kühlmodus | Passive Wärmeableitung | ||
| Lehrmodus | PC, APP (Android, iOS) | ||




{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
Zuletzt aktualisiert: 5 Apr, 2025