越疆 DOBOT DOBOT NOVA 2 商用協働ロボット
DOBOT Nova2 は、小売および商業目的に対応するように設計された多用途でコンパクトなロボット アームです。
Nova2 は 2 kg の可搬重量を備えており、さまざまなタスクを正確に処理できます。組み立て、ピックアンドプレース、テスト、またはその他の複雑な操作のいずれであっても、Nova2 は必要な強度と器用さを提供します。
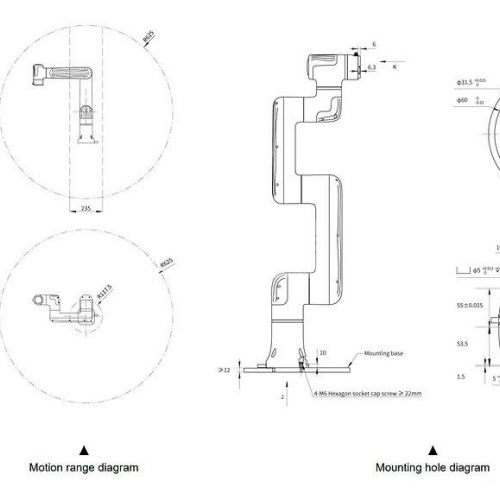
最大リーチは 625 mm で、物体の取り扱いやタスクの実行に十分な作業スペースを提供します。
Nova2 には、プログラミングと制御を簡素化するユーザーフレンドリーなインターフェイスが付属しています。直感的な操作のためのグラフィカル インターフェイスや、Scratch に似たブロックベースのプログラミング システムなど、複数のプログラミング オプションを提供します。これにより、あらゆるレベルの専門知識を持つユーザーが、特定の要件に応じてロボットの動作を簡単にプログラムおよびカスタマイズできるようになります。グラフィカル インターフェイス (スクラッチなど)、プログラミング言語 (LUA) または API (C、C#、Python、Kotlin...) を使用したスクリプト作成、ロボットを手動で動かして教える機能など、複数のプログラミング オプションを提供します。
さらに、Nova2 はさまざまなアクセサリや周辺機器と互換性があり、機能をさらにカスタマイズして拡張することができます。既存のセットアップやワークフローにシームレスに統合でき、生産性と効率が向上します。
Nova2 では、衝突検出や緊急停止機能などの高度な機能が組み込まれているため、安全性が最優先されています。これらの安全対策により、安全な作業環境が確保され、ロボットとオペレーターの両方が保護されます。
| 重さ | 11kg (24.3ポンド) | |
| 最大積載量 | 2kg (4.4ポンド) | |
| 作業半径 | 625 mm (24.6 インチ) | |
| TCPの最大速度 | 1.6 メートル/秒 (63 インチ/秒) | |
| 再現性 | ±0.05mm | |
| 関節可動域 | J1 | ±360° |
| J2 | ±180° | |
| J3 | ±156° | |
| J4 | ±360° | |
| J5 | ±360° | |
| J6 | ±360° | |
| 最大ジョイント速度 | J1/J2/J3 | 135°/秒 |
| J4/J5/J6 | 135°/秒 | |
| エンドI/O | ディ/ドゥ | 2入力 |
| RS485 | サポートされています | |
| IP等級 | IP54 | |
| ノイズ | 65dB(A) | |
| 温度範囲 | 0°~50°C | |
| 設置方向 | あらゆる角度 | |
| 消費電力 | 典型的 | 100W |
| 最大 | 250W | |
| ロボットからコントローラーまでのケーブル長 | 3 メートル (118.1 インチ) | |
| 材料 | アルミニウム合金、アクリロニトリル・ブタジエン・スチレン系プラスチック | |
| コントローラ | |||
| 寸法 | 200 mm x 120 mm x 55 mm (7.9 インチ x 4.7 インチ x 2.2 インチ) | ||
| 重さ | 1.3kg (2.9ポンド) | ||
| 入力電力 | DC30~60V | ||
| IOパワー | 24V、各チャンネル最大2A、最大0.5A | ||
| IOインターフェース | DI | 8入力(NPNまたはPNP) | |
| する | 8入力(NPNまたはPNP) | ||
| AI | 2入力、電圧モード、0~10V | ||
| あお | 2出力、電圧モード、0~10V | ||
| リモート電源オン/オフ | サポートされています | ||
| 通信インターフェース | ネットワークインターフェース | 2、TCP/IP および Modbus TCP 通信用 | |
| USB | 2、USBワイヤレスモジュールを接続するため | ||
| 485インターフェース | 1、RS485 および Modbus RTU 通信用 | ||
| 環境 | 温度 | 0°~50°C | |
| 湿度 | ≤95%、結露なきこと | ||
| IP等級 | IP20 | ||
| 冷却モード | 受動的放熱 | ||
| ティーチングモード | PC、アプリ(Android、iOS) | ||




{kind=link}
{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
Last updated: 5 Apr, 2025