Other Robots NJ-16-3.1
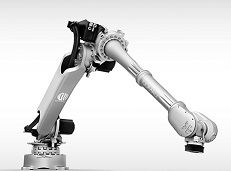
NJ系列工业机器人NJ-16-3.1设计用于中等负载,有效载荷为16 kg,范围为3108 mm,可提供更高的速度并优化循环时间。适用于电弧焊接工艺,机械加工,装配,搬运。配备C5G控制器和TP5示教器。
C5G控制器。
C5G控制器采用最新一代带有Core2 Duo技术CPU的工业PC APC820,能够以低能耗获得高性能
节能
•待机功耗最低,运行时消耗量低•冷却系统与控制单元的运行成正比
•具有高动态内容程序的能源网络恢复系统
灵活性和可靠性
基于Hilscher技术的新一代现场总线,由B&R集成在其远程I / O X20系列产品中,确保每个客户应用程序都具有灵活可靠的接口。模块化接口可用,如数字I / O,模拟I / O和多种位置传感器编码器,旋转变压器等。
安全
集成在SDM模块中的TUV认证(双通道紧急停止,启用设备,逻辑驱动启用)机器人手臂上的非制动功能和人机协作的互锁功能
模块化/可扩展性
模块化系统用于驱动多达13个轴的基本机柜功能和机器人模型
同时管理几个机器人
硬件体系结构旨在通过应用程序框在“多臂”组态中管理多达16个轴
使用Robosim Pro进行3D离线编程
多应用程序管理
可以同时管理多个应用程序
C5G开放式控制器:成为机器人运动的真正推动者
它允许使用传感器开发定制的运动算法和特殊应用
主要软件功能可用
•自动有效载荷识别:自动识别有效载荷以优化机器人运动
•碰撞检测:在发生碰撞时机器人紧急停止以保护机械师和设备
•协同和同步运动:协调和同时管理多个机器人和辅助轴(线性轨道,伺服枪,定位器和其他应用设备)
•传送带和传感器跟踪:跟踪线性和圆形传送带上运动的部件。通过使用不同类型的外部传感器追踪路径的精确度
•联合软伺服技术:单个机器人关节屈服于特定应用所需的外力的能力
•干涉区域:可以动态定义各种形状的区域以限制机器人的工作空间
•机器人绝对准确性:用于将实际运动学与脱机编程的理论模型相适应的算法
通用技术规范
- 机器人的最大负载:16公斤
- 最大范围:3108毫米
- 位置重复性:0.10毫米
- 控制器:C5G
机器人运动速度,单位为º/秒
- 轴1:170°/ s
- 轴2:150º/ s
- 轴3:165º/ s
- 轴4:265º/ s
- 轴5:250º/ s
- 轴6:340º/ s
运动范围(轴1至6)
- 轴1:+/- 180°
- 轴2:-60°/ + 125°
- 轴3:0°/ -170°
- 轴4:+/- 2700°
- 轴5:+/- 120°
- 轴6:+/- 2700°
应用
- 电弧焊接
- 激光焊接/切割
- 等离子切割/水射流
- 机器抚育
- 木材/玻璃加工
- 部件
- 搬运/包装
- 配药
- 测量/测试
- 按下按
- 抛光/去毛刺
- 按制动弯曲


{kind=link}
{kind=link}
Polígono Ugaldeguren III, nó 32, Pabellón 1
48170-Zamudio (Vizcaya) Spain
Tel. 0039 3387620171
0039 3395310971
daniela@eurobots.com
matteotenti@eurobots.com
最近更新: 9 Apr, 2025